TinkerForge 18 TinkerForge 1 St. Passend für (Entwicklungskits): TinkerForge
79,99 €
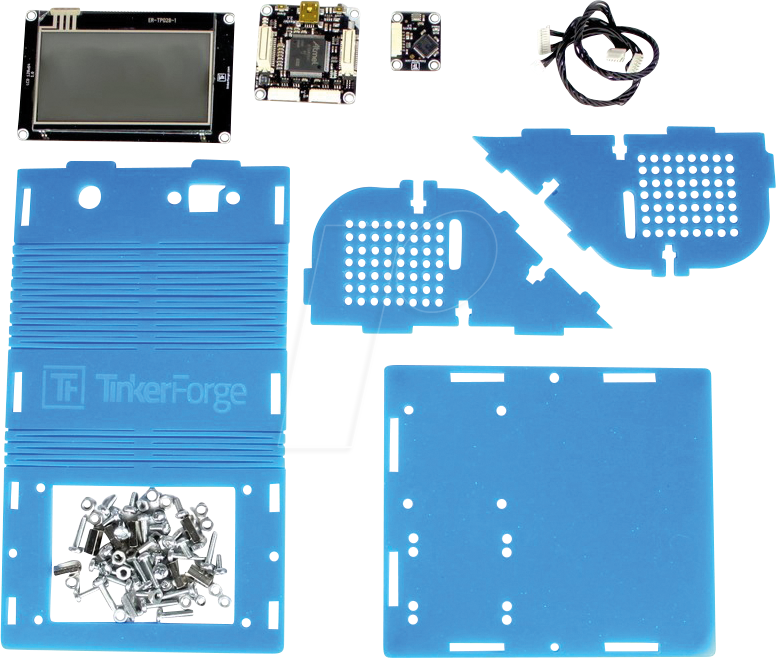
Der IMU Brick 2.0 ist der Nachfolger des IMU Brick mit höher auflösenden Sensoren, einfacherer Kalibrierung, zusätzlicher kontinuierlicher Selbst-Kalibrierung und einer um zwei Größenordnungen besseren Genauigkeit. Der IMU Brick 2.0 ist mit je einem 3-Achsen Beschleunigungssensor, Magnetfeldsensor (Kompass) und Gyroskop ausgestattet und arbeitet als USB Inertialsensor. Dieser kann 9 Freiheitsgrade messen und berechnet Quaternionen sowie auch unabhängige Gier-, Roll- und Nick-Winkel. Es ist ein vollständiges Attitude and Heading Reference System. Die API, verfügbar für viele Programmiersprachen, erlaubt den Zugriff auf die berechneten Daten sowie auf die Beschleunigung, Magnetfeld und Winkelgeschwindigkeiten für die drei Achsen. Wenn die Quaternionen-Darstellung benutzt wird, ist der IMU Brick Gimbal Lock frei (im Gegensatz zur Euler-Winkel Darstellung). Über zwei Anschlüsse können Bricklets angeschlossen werden, die die Fähigkeiten des Bricks erweitern. Als Beispiel kann ein GPS Bricklet angeschlossen werden um Positionsdaten zu ermitteln. Der IMU Brick 2.0 kann aber auch mit anderen Bricks in einem Stapel genutzt werden. Zum Beispiel kann ein zusätzlicher Master Brick mit Master Extensions genutzt werden, um die USB Verbindung durch andere kabelgebundene Schnittstellen (RS485, Ethernet) oder drahtlose Schnittstellen (WLAN) zu ersetzen. Erster Test Um einen IMU Brick 2.0 testen zu können müssen zuerst Brick Daemon und Brick Viewer installiert werden. Brick Daemon arbeitet als Proxy zwischen der USB Schnittstelle der Bricks und den API Bindings. Brick Viewer kann sich mit Brick Daemon verbinden, gibt Informationen über die angeschlossenen Bricks und Bricklets aus und ermöglicht es diese zu testen. Wenn der Brick per USB an den PC angeschlossen wird sollte einen Moment später im Brick Viewer ein neuer Tab namens "IMU Brick 2.0" auftauchen. Wählen Sie diesen Tab aus. Alle verfügbaren Daten des IMU Bricks 2.0 werden angezeigt. Wenn der IMU Brick 2.0 wie dargestellt gehalten und dann der "Save Orientation" Knopf geklickt wird sollten die Bewegungen des IMU Bricks entsprechend im Brick Viewer widergespiegelt werden. Nun kann ein eigenes Programm geschrieben werden. Der Abschnitt Programmierschnittstelle listet die API des IMU Brick 2.0 und Beispiele in verschiedenen Programmiersprachen auf. Kalibrierung Der IMU Brick 2.0 führt durchgehend eine Selbst-Kalibrierung durch. Es ist nicht notwendig eine gesonderte Kalibrierung von Hand durchzuführen. Die IMU kann die Kalibrierungsdaten speichern, um die Selbst-Kalibrierung nach einem Neustart zu beschleunigen. Diese Kalibrierungsdaten werden bei der Produktion bereits gesetzt. Klicken Sie den "Calibration" Knopf im Brick Viewer, um den aktuellen Zustand der durchgehenden Selbst-Kalibrierung einzusehen. Auf diesem Dialog können auch die gespeicherten Kalibrierungsdaten aktualisiert werden.
Deine Shops für beste Deals
Conrad
Logge dich ein für Coupon Details